Meta-World
We evaluate our method on 9 tasks from the Meta-World benchmark using a Sawyer robot. Each task involves different object interactions, with randomized setups. We collect 5 demo videos per task and test the learned policy 25 times per task. The results are shown in Tab. 1.
Notably, EC-Flow significantly outperforms baselines on challenging tasks like btn-top-press and hammer-strike, thanks to its robustness to occlusions during manipulation.
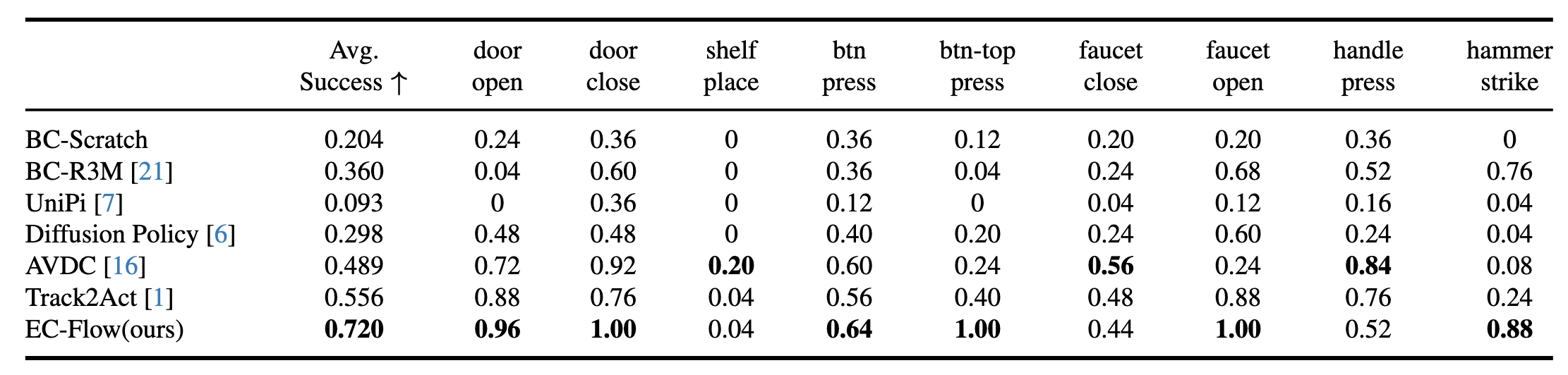
Table 1: Simulation results on Meta-World benchmark.
Meta-World Task Demonstrations
Door Open
Door Close
Shelf Place
Button Press
Button Press Top-Down
Faucet Close
Faucet Open
Handle Press
Hammer Strike
Real-World
We evaluate 7 tasks across rigid, deformable, and non-object-displacement categories, each trained on 5 action-free videos. Each task is tested 10 times with randomized object positions. The results are shown in Tab. 2.
EC-Flow uniquely enables successful manipulation of deformable objects and tasks without direct object displacement—scenarios previous object-centric flow methods failed to handle.

Table 2: Results on real-world manipulation tasks..
Real-World Task Demonstrations
Flow Prediction
Open Fridge
Open Drawer
Open Oven
Task Execution
Open Fridge
Open Drawer
Open Oven
Flow Prediction
Fold Clothes
Fold Towel
Rotate Switch
Task Execution
Fold Clothes
Fold Towel
Rotate Switch